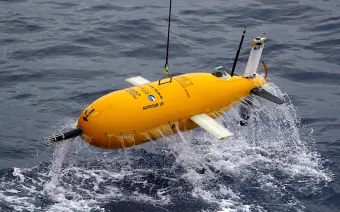
The first mission involving the NOC-developed autonomous submarine vehicle Autosub Long Range (ALR, known around the world as Boaty McBoatface) has for the first time shed light on a key process linking increasing Antarctic winds to rising sea temperatures.
Data collected during the April 2017 expedition – published this week in the scientific journal PNAS – will help climate scientists build more accurate predictions of the effects of climate change on rising sea levels.
The research studied the changing temperatures at the bottom of the Southern Ocean. During the three-day mission, Boaty travelled 180 kilometres through mountainous underwater valleys measuring the temperature, saltiness and turbulence of the water at the bottom of the ocean. Using an echo sounder to navigate, Boaty successfully completed the perilous route, reaching depths of up to 4,000 metres, to re-unite with the rest of the project team at the programmed rendezvous location where the sub was recovered and the data collected along its route were downloaded.
In recent decades, winds blowing over the Southern Ocean have been getting stronger due to the hole in the ozone layer above Antarctica and increasing greenhouse gases. The data collected by Boaty, along with other ocean measurements collected from research vessel RRS James Clark Ross, have revealed a mechanism that enables these winds to increase turbulence deep in the Southern Ocean, causing warm water at mid depths to mix with cold, dense water in the abyss.
The resulting warming of the water on the seabed is a significant contributor to rising sea levels. However, the mechanism uncovered by Boaty is not built into current models for predicting the impact of increasing global temperatures on our oceans. Boaty’s mission was part of a joint project involving the University of Southampton, the National Oceanography Centre, the British Antarctic Survey, Woods Hole Oceanographic Institution, and Princeton University.
Professor Alberto Naveira Garabato from the University of Southampton – who led the project – said: “Our study is an important step in understanding how the climate change happening in the remote and inhospitable Antarctic waters will impact the warming of the oceans as a whole and future sea level rise.”
Dr Eleanor Frajka-Williams of the National Oceanography Centre said: “The data from Boaty McBoatface gave us a completely new way of looking at the deep ocean – the path taken by Boaty created a spatial view of the turbulence near the seafloor.”
Dr Povl Abrahamsen of the British Antarctic Survey said: “This study is a great example of how exciting new technology such as the unmanned submarine Boaty McBoatface can be used along with ship-based measurements and cutting-edge ocean models to discover and explain previously unknown processes affecting heat transport within the ocean.”
Fly-through animation of ALR’s voyage (3.5 days compressed to 3.5 minutes) using ALR’s pitch, heading, roll, propeller speed and position information, JCR’s heading and position, and VMP position and depth. Created by Eleanor Frajka-Williams (co-investigator on DynOPO project), aided by Rob Templeton (National Oceanography Centre, Marine Autonomous and Robotic Systems engineer) and several expedition members.
- In 2018, Autosub Long Range completed its first successful under ice mission beneath the Filchner Ice Shelf in West Antarctica. This success marked a further significant milestone in proving the vehicle’s pioneering capabilities.
- Autosub Long Range recently featured in a BBC News article ‘Super-tough drones and robots going where we can’t’.
- Image gallery of the ALR deployment in the Southern Ocean.
Oceanids
Under the Oceanids programme, we are developing the next generation of innovative autonomous underwater vehicles which will push the boundaries of how we explore and understand our oceans. With capabilities allowing us to travel greater distances, explore under ice, and collect data in some of the most challenging and hostile environments, Oceanids is leading the way in autonomous marine exploration.
Oceanids will see the NOC and its partners deliver two new autonomous underwater vehicle (AUV) classes: three 1,500-m depth-rated Autosub Long Range vehicles (ALR1500) that will have longer endurance and greater payload capacity compared to the current vehicles; and a 2,000-m depth-rated Autosub capable of carrying high-power sensors and operating under ice (Autosub2KUI). The project will also deliver enhanced ‘command-and-control’ (C2) systems for efficient autonomous fleet management, and a range of new sensors to maximise science output from the new platforms. The programme will also feature a series of sea trials to ensure the new capabilities are ready for science deployments anywhere in the global ocean.