Mission Overview – AT-SEA
The National Oceanography Centre (NOC) is conducting research with robot submarine Autosub Long Range (ALR), better known as ‘Boaty McBoatface’ on end-of-life oil fields off the coast of the Shetland Islands. The ALR will help to monitor and protect the marine environment in the North Sea and to support industry transition towards its net-zero targets.
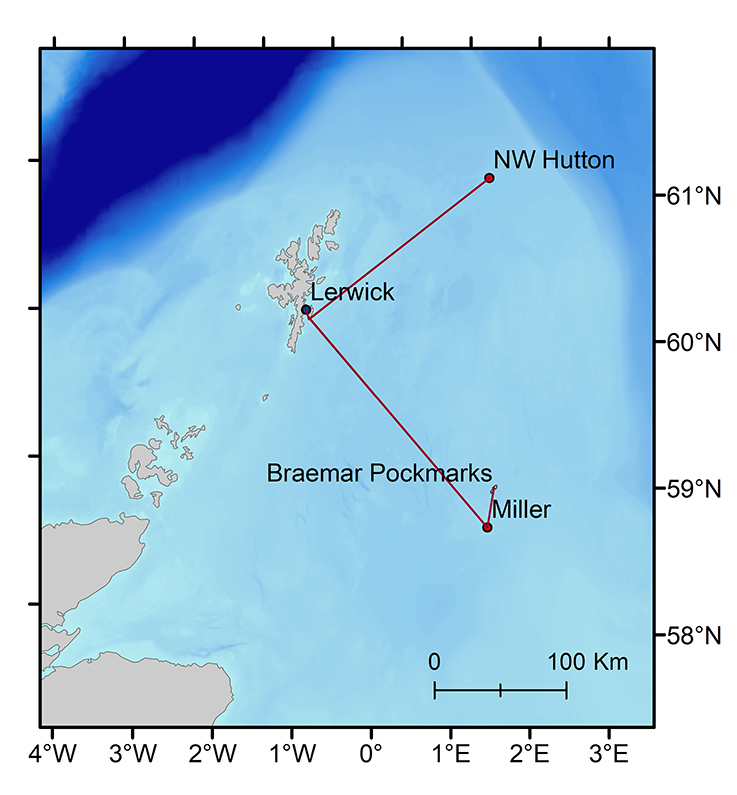
Mission location
The underwater robot will be exploring several oil and gas structures, including NW Hutton and Miller as well as the Braemar Pockmarks Marine Protected Area, revolutionising the way in which marine surveys are undertaken.
Mission aims
The Autonomous Techniques for infraStructure Ecological Assessment (AT-SEA) project, led by the NOC will trial the concept of using submarines like Boaty for high-tech, low-impact monitoring to pick up any potential environmental impacts at these industrial sites. This may eventually replace the current approach for environmental monitoring for decommissioning that requires dedicated ships and teams of people offshore.
Ocean robots, which use computer systems to carry out survey missions by themselves, are regularly used by scientists for environmental assessments as they collect very high-quality data quickly. Additionally, using autonomous underwater vehicles is a low carbon solution to the issues with environmental monitoring that will bring substantial reductions in emissions of greenhouse gasses over the traditional approaches of using ships. Recent technological developments have cut the cost and expanded the range of these robots to thousands of kilometres, making it possible for long-range assessments of multiple sites to be undertaken with a robot that is launched from the shore.
What will happen during the mission?
The NOC’s AT-SEA project will be taking place over a ten-day period using state-of-the-art technology, with the aim to provide future-proof solutions for the oil industry focusing on the need to reach better net-zero targets. The robots will gather data on the water, pollutants and currents, as well as taking images of the sea floor. The team will test whether these robotic systems can gather equivalent information to the surveys currently done using ships. In doing so, emissions, risks and the cost of these operations will be significantly reduced in the future, thanks to the automated technology being developed at the NOC.
Launch
The Autosub Long-Range ocean robot submarine, otherwise known as ‘Boaty McBoatface’, will be launched from the shore in Shetland, to carry out environmental assessments at two decommissioning sites in the northern North Sea.
Return to shore
The robot will then return around ten days later with the detailed survey information onboard. Boaty will take pictures of the seafloor using the University of Southampton’s BioCam system, which was developed as part of NERC’s Oceanids programme. The pictures which will be automatically stitched together to make a map of the seafloor, structures present, and the animals that live there. Established sensor systems will measure a range of properties of the water, including the presence of hydrocarbons. As well as the decommissioned sites, the robot will visit a special marine protected area that is known to have natural leaks of gas, to check the robot can reliably detect a leak should one occur in the future.
Recovery of data
On return to shore, the project team will examine all the data obtained and compare it to that gathered using standard survey ship methods. Additionally, the team will test if the same environmental trends can be identified from both datasets to determine if the automated approach would be a suitable replacement for standard survey ship operations.
Learn more with our AT-SEA mission videos
Take a tour of Autosub Long Range ‘Boaty McBoatface’
Watch our full mission summary
Project partners
![]()
