We have conducted research with our ocean robot Autosub Long Range (ALR), better known as ‘Boaty McBoatface’ on end-of-life oil fields off the coast of the Shetland Islands. The aim of the work was to explore if ALR can help to monitor and protect the marine environment in the North Sea and support industry transition towards its net-zero targets.
The underwater robot explored several oil and gas structures, including NW Hutton and Miller as well as the Braemar Pockmarks Marine Protected Area, revolutionising the way in which marine surveys are undertaken.
Mission aims
The Autonomous Techniques for infraStructure Ecological Assessment (AT-SEA) project, led by the NOC trialled the concept of using submarines like Boaty for high-tech, low-impact monitoring to pick up any potential environmental impacts at these industrial sites. This may eventually replace the current approach for environmental monitoring for decommissioning that requires dedicated ships and teams of people offshore.
Ocean robots, which use computer systems to carry out survey missions by themselves, are regularly used by scientists for environmental assessments as they collect very high-quality data quickly. Additionally, using autonomous underwater vehicles is a low carbon solution to the issues with environmental monitoring that will bring substantial reductions in emissions of greenhouse gasses over the traditional approaches of using ships. Recent technological developments have cut the cost and expanded the range of these robots to thousands of kilometres, making it possible for long-range assessments of multiple sites to be undertaken with a robot that is launched from the shore.
Watch our full mission summary:
Dr Daniel Jones
01/09/2022
21-days
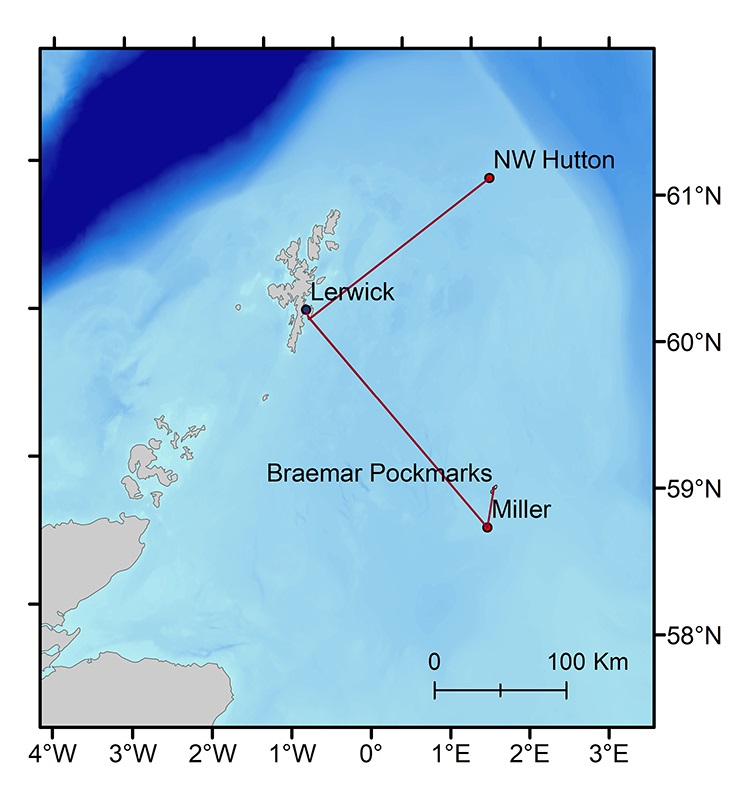
The three decommissioning sites are:
NW Hutton (61.11°N 1.31°E, 144m water depth)
Miller (58.72°N 1.40°E, 102m depth)
Don (61.50°N 1.60°E; 160m depth)
The planned track also passes through the:
Braemar Pockmarks Special Area of Conservation (58.99°N 1.47°E, 120m depth).