Autonomous Underwater Vehicles (AUVs) are robot submarines, which are used to explore the world’s oceans without a pilot or any tether.
Before launch from the research ship, the AUV’s computers are programmed with instructions of where to go, what to measure and what depths to go to. With no link to the mother ship, all communications with the AUV are limited to using acoustics (sound) while the AUV is underwater (this typically has a range of a few kilometres), or satellite communications (such as Iridium) when the AUV is floating on the sea surface.
The National Marine Equipment Pool at the NOC has been developing the Autosub range of AUVs for many years with the first missions taking place in 1997. Explore our 'Story of Autosub' interactive timeline here.
Power and propulsion
Energy supply for the propulsion system and sensors is a challenge for AUVs. Without the supply of oxygen from the atmosphere, internal combustion engines are not practical. Rather, the AUV must rely on batteries. As the amount of energy available from 1kg of the best batteries is about ten times less than that available from the same quantity of diesel fuel, currently AUVs are limited in range and speed compared to surface vessels. As the required propulsive power increases very rapidly with operating speed (approximately proportional to the speed cubed), the solution is usually for the Autosub to travel slowly to enable sufficient range. The current Autosub AUVs run at approximately 1.7ms−1 (surface ships typically run at 5 to 10ms−1).
Navigation
Accurate navigation is also a challenge for an AUV. At the sea surface, AUVs can be positioned using the satellite-based Global Positioning Systems (GPS), however, satellite signals are not able to penetrate even the top few millimetres of the ocean and hence other means are needed to navigate the AUVs once they have dived. The Autosub AUVs rely mostly on an approach known as dead reckoning; the AUVs bounce sound off the seabed, and by measuring the Doppler shift of the echoes, they are able to measure their speed relative to the seabed. For dead reckoning, the AUV must also accurately sense its heading. On the Autosub AUV a fibre-optic gyro-based sensor is used, giving heading accuracy of better than 0.1 degrees. Overall, accuracies of about one metre error for each kilometre travelled are achievable. Navigation accuracy is critical to many survey missions, and hence, the NOC are researching and developing techniques to further improve upon this performance.
The NOC Autosub fleet
The NOC operates seven AUVs: Autosub 5 and six Autosub Long Range vehicles.
Autosub 5
Autosub 5 (previously Autosub 2000 Under Ice Phillips et al. 2020) is a high power work class 6m 2t AUV. Developed in house at NOC, Autosub 5 is the latest iteration of the highly successful Autosub family of AUVs, designed to explore at depths of up to 6000m.
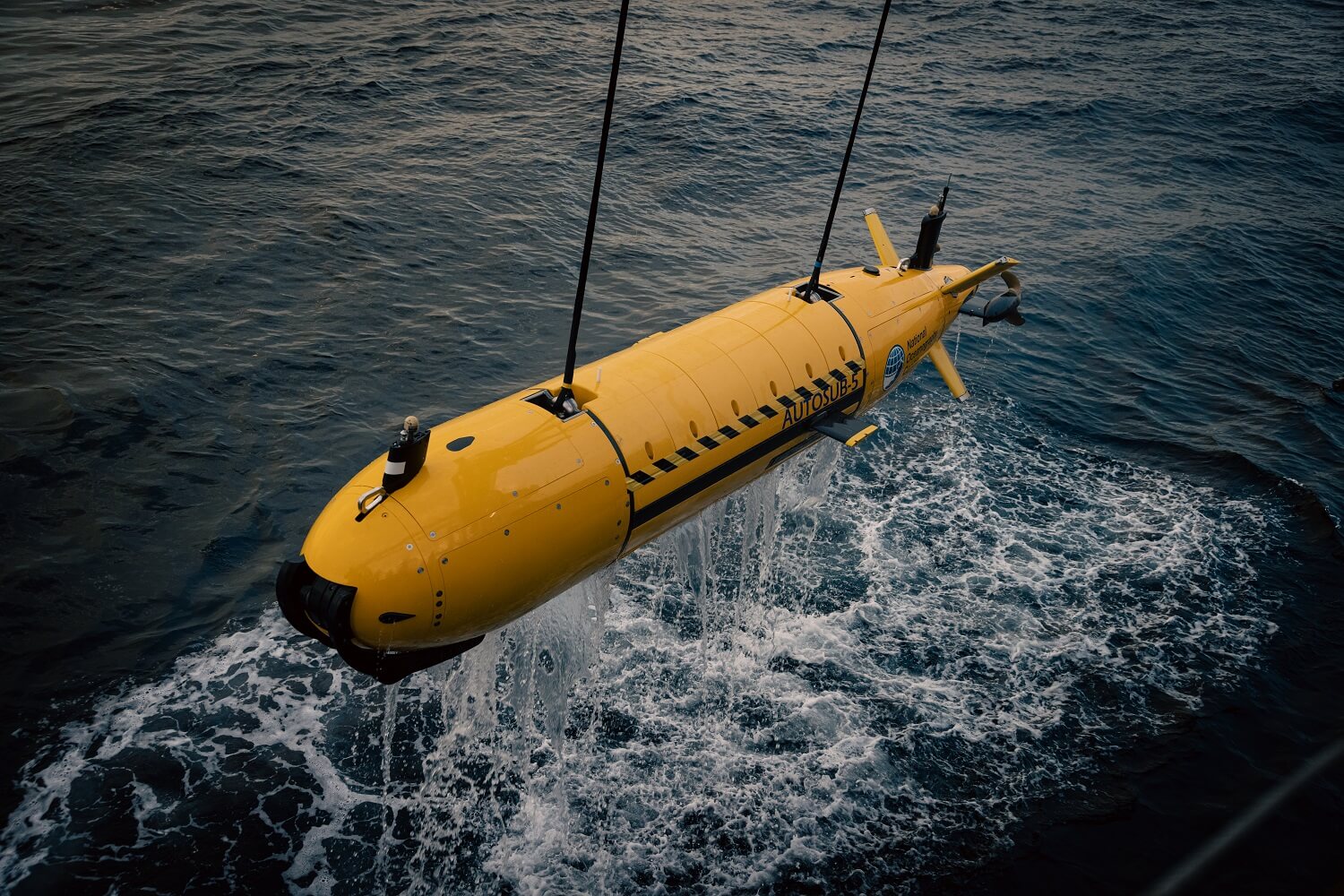
The vehicle itself consists of a free flooded nose section containing sensors, a centre section of syntactic foam (the buoyancy) and batteries, the aft section is also free flooded containing navigation, additional sensors and the vehicle control in the form of twin thrusters and 4 independent fins. Its primary objective is to be launch from a ship such as the RRS James Cook to image the seabed in high resolution by operating multibeams used for topographic mapping, sidescan sonars used for acoustic imaging of the seabed, sub bottom profilers use to see what is in the first few meters under the seabed and camera systems.
Other standard sensors include the ADCP for water column tracking and CTD (conductivity temperature depth). Specifically, for this cruise and upcoming cruises it has been fitted with the ROCII EDNA sampler, a magnetometer and a single channel fluorometer. The vehicle has been designed by the NOCs Marine Autonomous robotics division to suit the needs of UK science with the primary goal being modularity so new experimental sensors can be accommodated.
This version features an updated navigation package providing a step change improvement in navigational accuracy.
The Autosub sub is launched and recovered using our unique dual winch davit Launch and Recovery system, which allows operation in open ocean, up to a sea state 4.
Autosub Long Range
The Autosub Long Range AUV (or Autosub LR) is a new type of AUV with a depth rating of 6000m. Although a third the weight of the Autosub3 and the Autosub6000 AUVs, it is able to travel greater than ten times the distance and can be deployed for over a hundred times the duration.

The key to achieving this performance is efficient propulsion at slow speed (at 0.4 ms−1), and by keeping tight control of the power used by the AUV sensors and control systems. One area in which recent advances in technology has helped make this possible has been in the development of microprocessors for devices such as mobile phones which have ample processing power, but which use very little energy.
With a 2000km range, and a depth rating of 6000m, this AUV is very useful to oceanographers in providing measurements of ocean and seabed properties over ocean scales, and without the need for a research ship. The AUV periodically surfaces and transmits the data back to the scientists via an Iridium satellite data link.