A diverse range of methods and equipment are used for obtaining samples from the sea and seabed, depending on the material or measurement required.
The National Oceanography Centre has a vast array of sensor and mooring equipment used for sampling seawater to collect a range of oceanographic data across multiple parameters.
Find out more about the National Marine Equipment Pool
Instruments for sampling a wide range of oceanographic parameters include profiling instruments and shallow towed instruments deployed from research vessels at sea, or moored applications and platforms, which can be left at sea for significant periods of time (up to 24 months).
Explore the range of sensors and mooring equipment used for sampling seawater.
Sensors on a CTD sampling frame
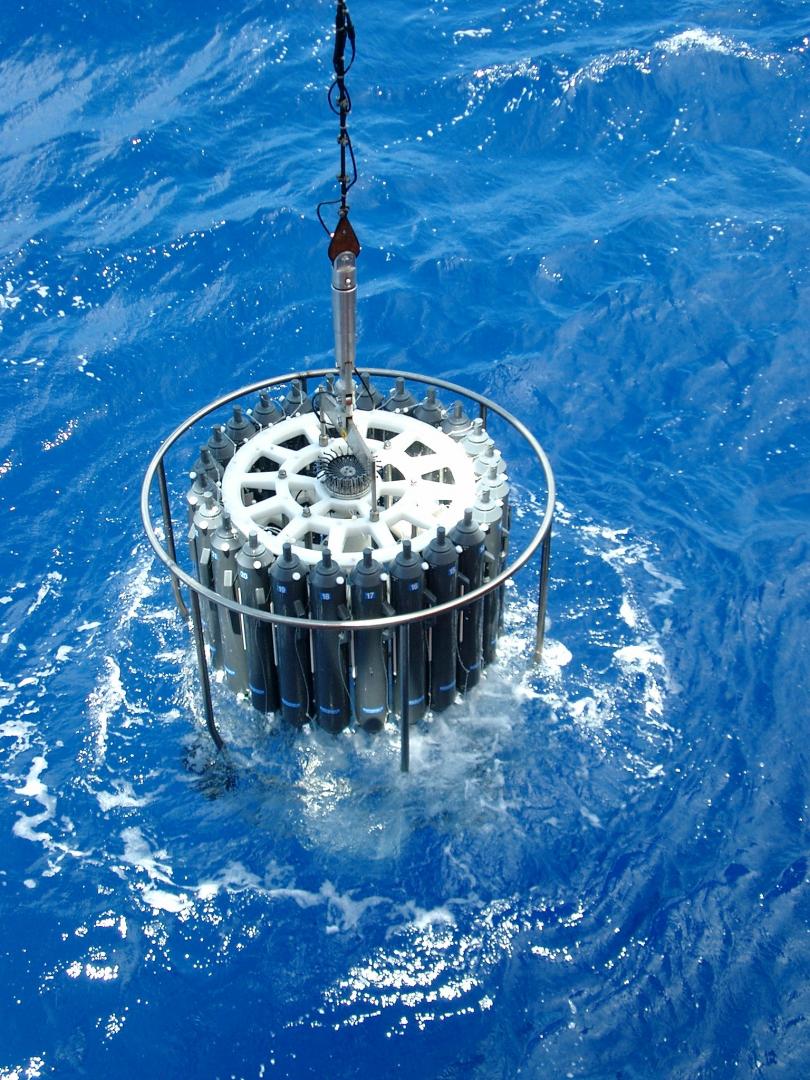
The CTD (conductivity, temperature, depth) sampling frame is used on 90% of all research cruises and provides real-time, accurate and precise data from the water column. The stainless steel frame is able to take measurements up to 6,000m in depth and usually has a rosette of water bottles that can collect up to 24 samples at depths chosen by the operator. These water samples can then be used in the laboratory to undertake a wide range of physical, chemical and biological investigations.
Parameters that can be measured by instrumentation fitted to the frame
- Conductivity (used for calculating salinity)
- Temperature
- Pressure (to infer depth)
- Turbidity (particulate concentration in the water column)
- Fluorescence
- Photosynthetically active radiation
- Dissolved oxygen
- Current (using a lowered acoustic Doppler current profiler).
Water bottle sizes for 24 samples
- 10 litres
- 20 litres.
We also support a titanium frame holding twenty-four 10-litre water bottles to take water samples for trace metal analysis.
SeaSoar
SeaSoar is one of the leading towed oceanic vehicles for the acquisition for oceanic data. The robust, high performance vehicle is proven to have collected reliable data over long distances. For example, on a recent cruise in the Southern Ocean, SeaSoar was in the water for 96 hours, covered 1607km and collected 1,458 profiles.
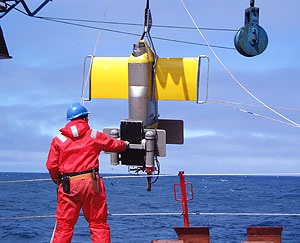
SeaSoar resembles a very small aeroplane. It is towed behind a research vessel at speeds of between 9 and 12 knots and undulates up and down in the water column (up to 420m depth), controlled by hydraulics. Data is transmitted back to the research vessel in real time via the conductive tow cable.
Parameters measured by the instrumentation
- Conductivity (used for calculating salinity)
- Temperature
- Pressure (to infer depth)
- Dissolved oxygen
- Turbidity (particulate concentration in the water column)
- Irradiance
- Bioluminescence
- Fluorescence
- Plankton
Scanfish
Scanfish is a towed undulating vehicle that is like a large flying wing and uses small electrically driven flaps to change its own attitude and therefore angle of attack. Though it has a smaller payload than SeaSoar, it has a very high quality CTD. It will only dive to around 150m without a depressor weight, however is very controllable. The ship speed for undulation need only be around 6 knots allowing it to collect higher resolved spatial data compared to SeaSoar.
Parameters measured by the instrumentation
- Conductivity (used for calculating salinity)
- Temperature
- Pressure (to infer depth)
- Dissolved oxygen
- Bottom depth
Moving vessel profiler
The moving vessel profiler (MVP) allows near vertical profiles to be measured from a moving vessel, typically to 300m depth at a speed of 10 knots. The system is comprised of an electro mechanical winch system with a Kevlar conducting cable, the tow fish carrying the instrumentation and the control and data acquisition elements, which can display the data in real time.
The instrument package is mounted in a small torpedo shaped tow-fish and this is towed on a rope from the side or aft of the ship by a semi-automatic electro-hydraulic winch. To start a profile, the brake on the winch is released and the tow-fish starts falling through the water column under gravity. When a predetermined maximum depth is reached the brake is applied to the winch drum and the fish immediately starts returning towards the surface due to the cable drag forces returning the towed system to its natural equilibrium streaming point.
Since the MVP can profile at very slow ship speed (even stationary profiling) it can collect very high resolved spatial data compared to both Scanfish and SeaSoar. However, the continuous turning of the winch drum during operation means that the system requires regular maintenance.
Parameters measured by the instrumentation
- Conductivity (used for calculating salinity)
- Temperature
- Pressure (to infer depth)
- Chlorophyll concentration
- Light intensity
Vertical microstructure profiler
Vertical microstructure profilers (VMP) are used for making small-scale measurements in the water column. VMPs are long, slender devices with the instruments contained at the nose of the profiler. These profilers contain shear probes, which are very fragile airfoil section strain instruments that are incredibly sensitive.
Deployed from a stationary vessel, the turbulence profiler falls under its own weight at constant speed. Small shear currents that the profile descends through cause a deflation of the shear sensors. The shear measurement and internal accelerometers can provide information about small scale mixing processes in the water column.
When the maximum depth is reached (usually deliberately to the ocean floor as there are often interesting currents here), the profiler is recovered either with a winch on a slack line or by dropping ballast weights for an untethered profiler. Tethered profilers can be deployed to around 200–2,000m, but untethered instruments can go to 6,000m. An untethered instrument can be deployed concurrently while operating the CTD sampling frame.
Untethered profilers use a combination of recovery aids including acoustic navigation and pressure telemetry while submerged, and radio direction finding, satellite beacons, lights and flags to allow us to locate them on the surface.
Parameters measured by the instrumentation
- Conductivity (used for calculating salinity)
- Temperature
- Pressure (to infer depth)
- Current
- pH
- Turbulence/shear
- Florescence
Stand-alone pump system
Some trace measurements require so much water that the volume that the CTD water bottles can obtain is not enough. For such measurements, we use a device called a stand-alone pump system (SAPS).
This is a battery powered water pump that sucks water through various filters leaving the object of interest on the filter paper for analysis. These can be used for trace metals and also biological applications.
The SAPS is programmed with a delay time (to allow them to get to their target depth – sometimes hours) and a pump time. With the ship stationary, they are usually clamped to a hydrographic wire for deployment, however they can also be fitted on the CTD frame and onto moorings. They can be lowered to 6,000m and can pump thousands of litres of water over a couple of hours.
A pressure and temperature sensor can be attached to the frame so that the exact depth of the SAPS is known. The temperature measurements can also be helpful in inferring different water masses that pass during pumping.
Parameters measured by the instrumentation
- Temperature
- Pressure (to infer depth)
Moorings
Moorings are fixed at a particular location in the ocean for up to 24 months at a time. The data gathered are transmitted back to shore via satellite link, enabling real time analysis of a wide range of oceanographic parameters as well as monitoring meteorological events. Great care and attention to detail are essential to ensure reliable and consistent operation.
Stationary platforms
Stationary platforms moored in the ocean are used to provide time series data for a select location.
Mooring arrays
Mooring arrays include many individual moorings, spaced out across an area of ocean, which can be used to assess how oceanographic parameters change across a specific region of the ocean. These are used for projects such as the RAPID project.